机器人与人类协同工作,从事家务、待客、医疗、养老等多种工作。这种犹如小说和电影中描绘的世界正在逐步成为现实。早稻田大学理工学术院的菅野重树教授领导的研究团队正在开展以“通过AI和机器人的共同进步,2050年之前实现能够自主学习和行动,并与人类共存的机器人”为目标的项目。本文请菅野教授介绍了用一台机器人执行多种任务的“智能机器人”的开发现状和未来前景。

对标《铁臂阿童木》中的未来世界
40多年来持续不断研究
手冢治虫的代表作《铁臂阿童木》中描绘的“机器人与人类和谐共处的社会”,想必每个人都曾幻想过那样的未来世界吧。机器人能够与人交流,还能够担负家务和待客等各种任务。特别是在因少子老龄化导致劳动人口减少,导致人才短缺的福祉和医疗领域,人们对能够与人类一起行动并对人类提供协助的机器人应用前景寄予厚望。
然而,纵观目前的机器人,可以发现尽管机器人在汽车等制造现场的自动化、前台接待和商场楼层引导,以及餐厅送餐服务等特定任务的执行方面已经取得了长足的进步,但一台机器人无法执行多项不同任务也是实情。此外,机器人要真正做到“与人类接触”,不仅在材料方面,在触碰到人时的力度等动作方面也要求“柔软”和“细微”。
致力于解决上述课题,目标在2050年之前创造出能够自主执行从商务到家务、护理、看护和治疗机器人的是早稻田大学理工学术院的菅野重树教授。菅野教授介绍,他是在1973年看到世界上第一个可以站立行走的人形机器人“WABOT-1” 开发成功的新闻后,开始立志从事机器人研究的。WABOT-1是由被称为日本机器人研究之父的已故加藤一郎教授当年在早稻田大学任职期间开发出来的。菅野教授回顾道,“我就是决心要在研究仿人机器人的加藤老师的指导下学习,才报考了早稻田大学。成功考取早大后,我便加入了加藤老师的研究室,愿望得以实现”。
进入早稻田大学研究生院的菅野先生在加藤教授的指导下,加入了曾在国际科学技术博览会上展出的键盘乐器演奏机器人“WABOT-2”的开发团队。此后,接连开发出了世界上首款配备能打鸡蛋的机械手的机器人“WENDY”;具备原始智能和情感的机器人“WAMOEBA”;以及2007年推出的人类共存机器人“TWENDY-ONE”(图1)等多款机器人。40多年来,菅野教授一直在致力于实现可与人类互动的机器人领域的研究。
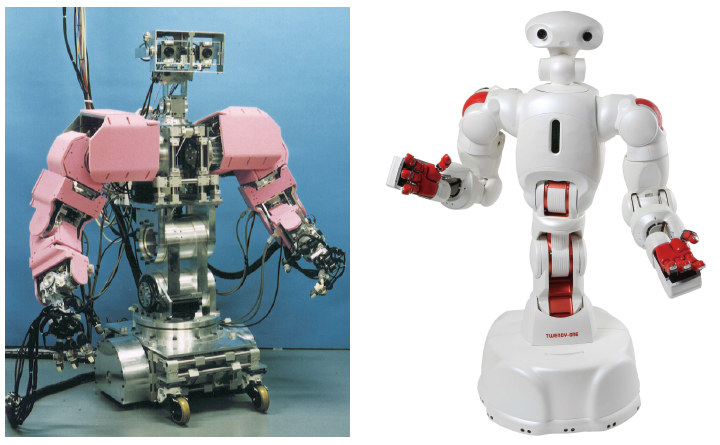
图1 菅野先生开发的机器人。
WENDY是世界上第一个通过在各个腕部关节增加被动柔性,可以漂亮地完成打鸡蛋动作的机器人(左)。随后开发的TWENDY-ONE,通过被动柔性实现了伴随人和适应环境的功能,并加强了可以支撑人体的力量,设想应用于家务及护理用途(右)。
一台机器人配备多种功能
关键在于沟通能力
菅野先生作为日本科学技术振兴机构(JST)登月型研究开发事业目标3“一人一台终生伴随智能机器人”项目的负责人,目前正致力于开发新型机器人。该项目的理念是通过创造源于日本的颠覆性创新,解决日本面临的少子老龄化、全球变暖和大规模灾害等各种问题,在大胆设想的基础上开展具有挑战性的研究和开发。项目在“社会”、“环境”和“经济”三个领域设定了医疗、环境、AI、机器人等9个目标。
项目的最终目标是创造出能够在各种场合自主动作,在伴随人的同时执行多项任务的机器人。例如,福利和护理领域有各种各样的自动化工具,可以将每种功能都机器人化。“但是,这种方法将导致机器人的数量大幅增加”,菅野先生在谈到机器人社会时指出了上述问题。
目前,菅野先生正在开发一款名为“AIREC(AI-driven Robot for Embrace and Care)”的机器人。这款机器人可以称得上是和智能手机一样的,一台设备中包含多种功能的“智能机器人”。菅野先生对进入21世纪以来AI和控制器取得巨大发展的现状持积极看法,他表示“相信通过将现有技术与新开发的硬件相结合,将能够开发出前所未有的机器人。我们项目的目标是打造一个全新的机器人世界,而不仅仅是现有机器人的升级”。
为实现智能机器人,菅野先生正致力于开发利用AI实现高度适应环境的柔性机器人技术,以及可在包括人类在内的现实空间中,具有可灵活驱动机器人躯体的运动智能以及拥有相互沟通智能的机器人。此外,作为实施体制,每个研发项目都制定了以下目标:①构建智能机器人的躯体和控制系统;②构建智能机器人的智能系统;③开发智能机器人在福祉和医疗领域的应用技术;④制定智能机器人的实际应用方案(图2)。
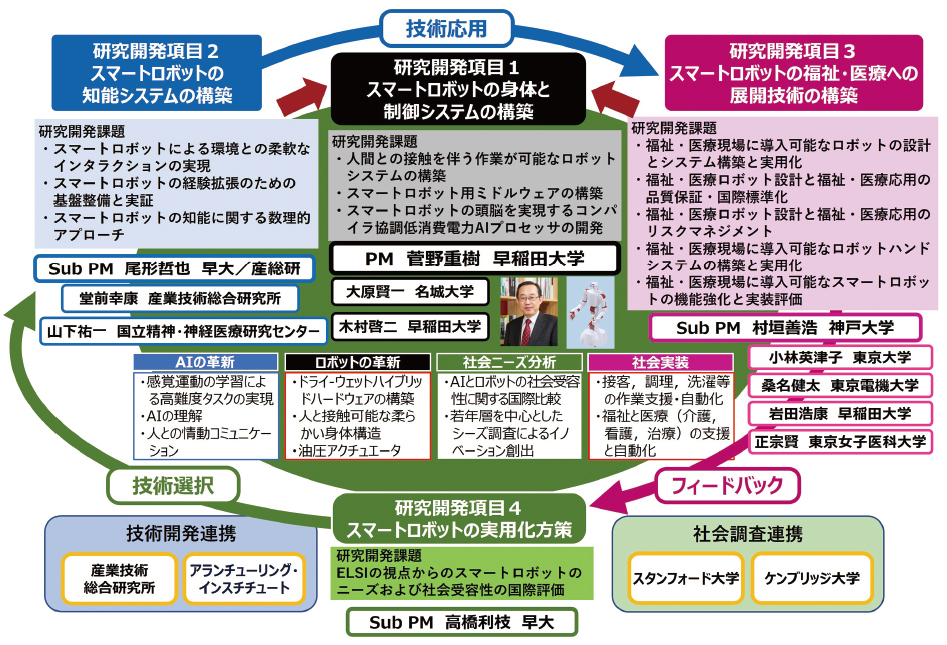
图2 “一人一台终生伴随智能机器人”项目框架
从“硬/重”到“柔软”
安全且具有自我修复能力
实现智能机器人的目标之一就是将传统的又“硬”又“重”的机器人进化为安全“柔软”的机器人。目前的机器人出于耐用性等考虑,表面和内部控制机构多使用金属和强化塑料,但坚硬的机器人在与人密切接触时可能会导致危险的发生。此外,为了让机器人与人互动,能够根据情况调节机器人力度的大小也很重要。实现此类柔性机器人的举措之一就是开发模仿人体的新型“干湿混合智能机器人”(图3)。
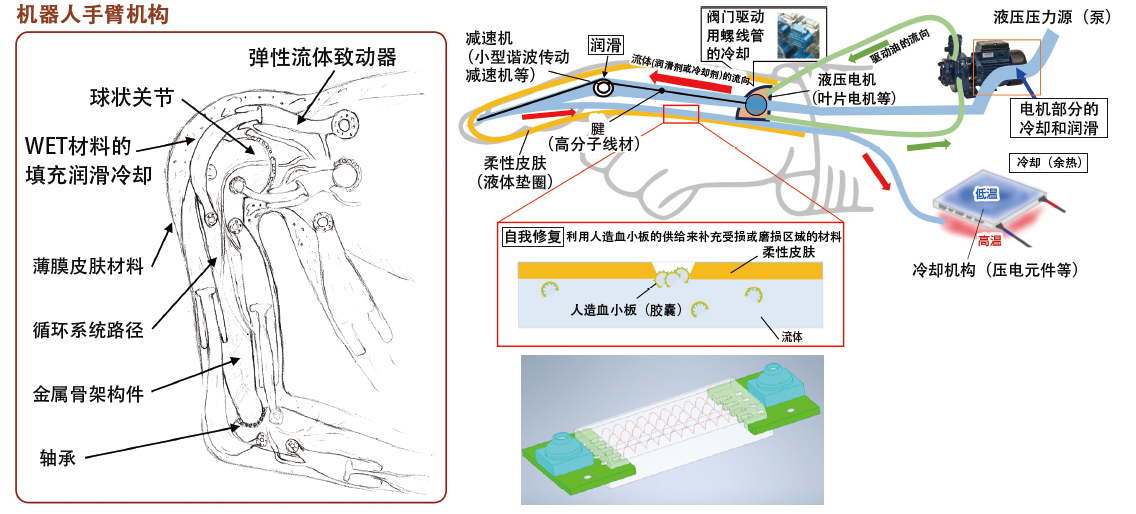
图3 干湿混合智能机器人的开发。
通过骨骼和关节材料的选取和结构的设计,创造出各连接件之间没有空隙的安全机器人(左)。最近,将动能转化为机器人手部运动的磁粘弹性流体叶片电机致动器与用于冷却和自我修复目的循环系统结合起来的尝试(右上),为提高可靠性和伸缩时能够稳定输出的皮肤传感器(右下)都在推进之中。
干式是指与传统机器人一样,身体和内部控制机构由硬质材料制成的机器人。相对而言,湿式是指使用的是具有人类和动物等生物体的“柔性”材料。柔性是通过将表皮、关节和肌肉等机器人的机构转化为化学和流体系统来实现的。此外,柔性的特征是通过在全身循环油剂、冷却剂和润滑剂等体液,具有与人类和动物类似的“自我修复功能”。
结合了干式和湿式的长处,即兼具传统机器和生物优势的机器人就是干湿混合智能机器人。例如,与人体骨骼相对应的构件由金属材料制成时,即使受到强烈冲击,也几乎不会断裂。菅野先生解释说:“另一方面,由于拥有与生物体相似的循环系统,因此即使发生故障,也可以通过自己提供修复材料进行自我修复”。为了实现这种机器人,目前研发团队正在推进机械手的制动器采用导入磁粘弹性流体的液压电机,以及自我修复用胶囊等关键技术的开发。(未完待续) (TEXT:佐宗秀海、PHOTO:伊藤彰浩)
原文:JSTnews 2024年3月号
翻译:JST客观日本编辑部