东京大学研究生院信息理工学系研究科智能机械信息学专业的竹内昌治教授(机械工学)等成功开发出一款通过骨骼肌组织的收缩进行运动的双足行走机器人。这在世界上尚属首次。该机器人能够进行篮球比赛中常见的以轴心脚为支点旋转的“陀螺转身”,并可以以机器人尺寸二分之一的旋转半径转换方向。研究人员表示,这一成果将有助于开发以肌肉组织为驱动源的机器人,并促进对人类行走机制的理解。
融合生物来源材料和机械部件制成的机器人被称为“生物混合机器人”。以肌肉组织作为机器人驱动源的相关研究正在不断取得进展,海外已经发布了诸如毛虫一样爬行或像鱼一样用鳍游泳的机器人,但由于这类机器人无法在转向时停止前进,实现小范围转弯非常困难。
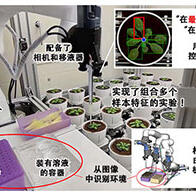
作为仿人机器人研究的一部分,竹内教授等计划制作一种能够实现精细旋转动作的生物混合双足行走机器人。他们在由3D打印机制作的塑料上安装了有机硅类材质的柔软基板和培养的骨骼肌组织。通过电刺激使肌肉组织收缩,机器人的脚就会弯曲,从而实现两足行走。通过将一只脚固定为轴心脚,仅对另一只驱动脚施加电刺激,即可实现旋转。
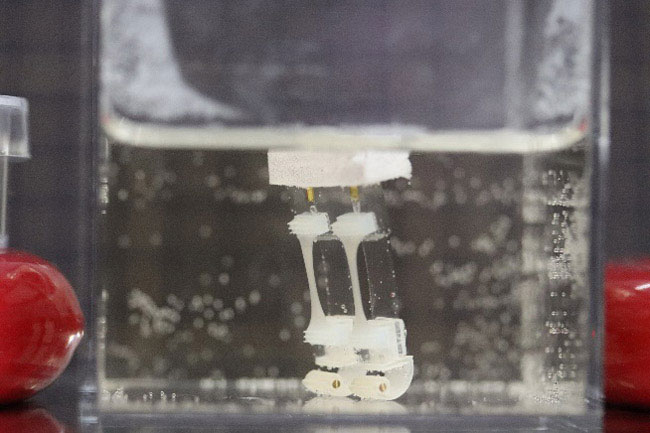
双足行走机器人。脚长约2cm,宽约1cm。在培养液中使用浮子和重物保持直立姿势。透明柔软的基板前方,看起来被拉伸成白色的肌肉组织即为驱动源。(供图:东京大学教授竹内昌治)
关于转换方向的小范围转弯,以往的无法停止前进的机器人的“旋转率”,即机器人长度与转弯半径之比为0.4,需要沿着机器人尺寸更大的圆形来转换方向。然而,这款双足行走机器人的旋转率为2.1,相对于并拢后宽约1cm的两只脚,可以沿着半径5mm左右的圆形来转换方向。
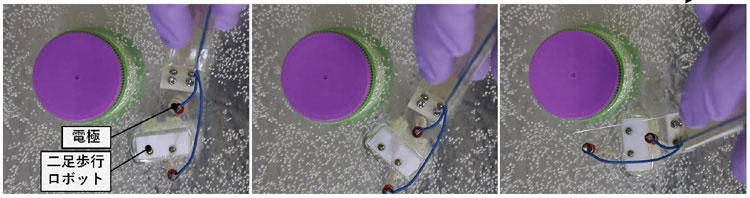
双足机器人的旋转运动。从上方观察可见,从左至右的照片中,机器人大约向右旋转了90度(供图:东京大学教授竹内昌治)
关于今后的发展,竹内教授表示:“肌肉的输出功率与其截面积成正比,因此要产生更大的力量就需要更粗的肌肉,但目前将养分输送到肌肉内部的技术等尚未确立。我们希望结合研究室正在进行的培养厚肉的知识,来改进双足行走机器人。”
该研究与早稻田大学合作进行,并于2024年1月26日刊登在美国科学杂志《Matter》的电子版上,预计将成为3月号的封面。
【相关链接】
• 东京大学新闻稿 世界首例!肌肉驱动的双足行走机器人
• 东京大学竹内昌治研究室的X(前Twitter)账号
【论文信息】
杂志:Matter,
论文:Biohybrid bipedal robot powered by skeletal muscle tissue
DOI:10.1016/j.matt.2023.12.035
原文:JST Science Portal 编辑部
中文:JST客观日本编辑部