日本东北大学林部充宏教授等人开发出一种能让机器人基于触觉信息自主决定行动的人工智能(AI)。这种机器人能够通过触碰魔术贴表面来识别正反面,并能完成线缆捆扎的作业。目前主流AI以图像信息为基础,而触觉信息的引入有望实现更高级别的作业。
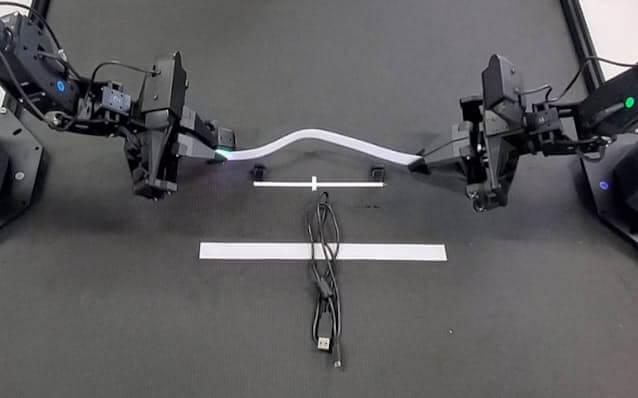
机器人通过手臂前端的触觉传感器识别魔术贴的正反面(供图:东北大学林部充宏教授)
此次开发的AI,其工作原理是基于安装在机器人手臂前端的触觉传感器所获取的信息以及摄像头所捕捉的图像,由AI生成机械臂的动作步骤并执行作业。研究团队通过远程操作对机器人进行了1小时左右的训练,再让AI学习这些作业数据。结果显示,机器人能以90%以上的精度将随机摆放的魔术贴配对粘贴。
对于正反面颜色相同的魔术贴,仅通过摄像头捕捉的图像很难识别出粘贴面。研究团队通过结合图像信息中所没有的触觉信息,实现了机器人正确粘贴魔术贴的作业。
人类可以一边单手操作手机,一边不用看就用另一只手拿起放在桌边的杯子喝水。这种同时执行多项作业的“多任务处理”能力对现有机器人来说难度很大,要实现这一功能,需要有像大脑一样综合处理视觉、触觉、听觉等多种信息的机制。
相关研究成果的论文已发表在国际学术期刊《IEEE Robotics and Automation Letters》上。研究团队计划今后进一步推进结合了声音信息的机器人AI的开发。
原文:《日本经济新闻》、2025/7/29
翻译:JST客观日本编辑部
【论文信息】
期刊:IEEE Robotics and Automation Letters
论文:TactileAloha: Learning Bimanual Manipulation with Tactile Sensing
DOI:10.1109/LRA.2025.3585396