老化的桥梁和大型建筑物的检查已成为日本当前的一个重要课题,尤其是在难以进行人工作业的场所,亟需利用机器人手臂来解决这个课题。
因此,日本新能源产业技术综合开发机构(NEDO)与东京工业大学联合推进能进入狭窄空间内的细长型机器人的研发,最终于2018年9月开发出了全球最长的超长多关节机器人手臂,机械臂长10m,直径为20cm,重300kg,可动范围的最大高度为10m、水平方向为8m。
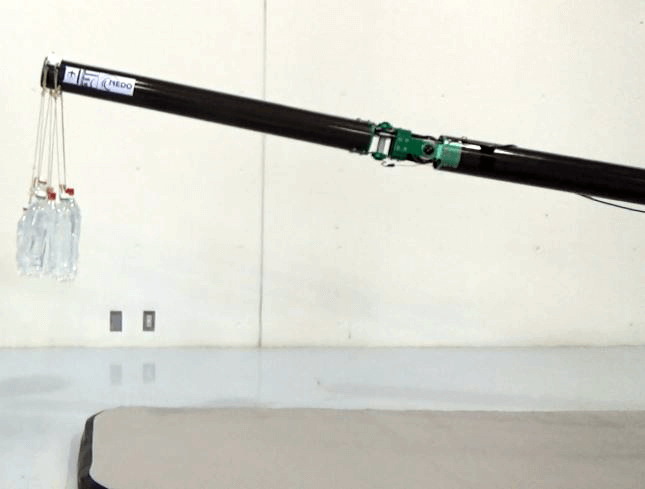
图1:经验证,机械臂顶端能保持水平承受10kg的重物
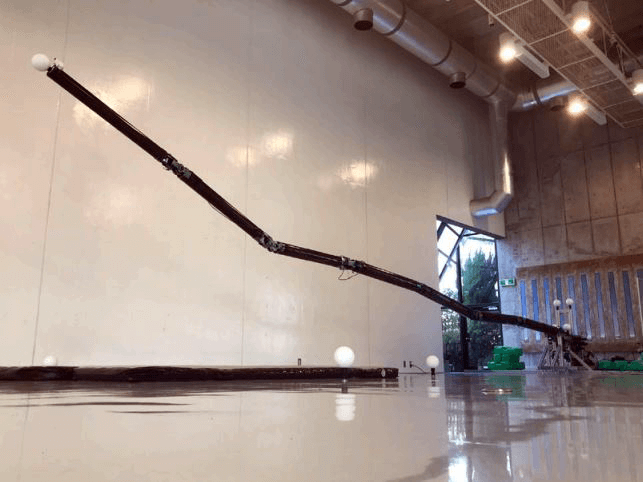
图2:整个机械臂长10m,直径为20cm,重量为300kg(机械臂部分重50kg,基础部分重250kg)
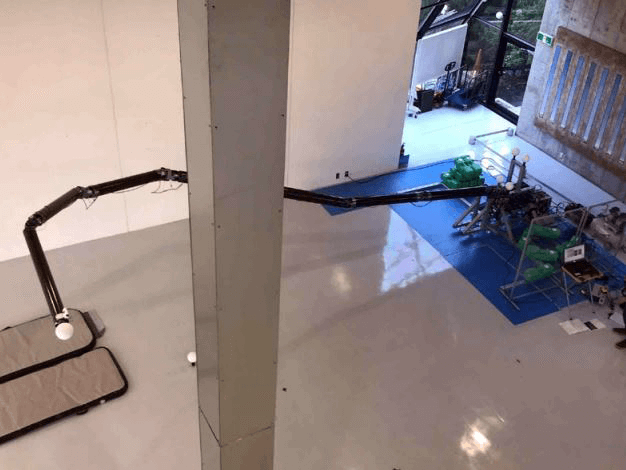
图3: 超长多关节机器人手臂向侧面空间弯曲
此次验证,这款机器人手臂的顶端可以在水平方向承受10kg的重量。基于杠杆原理,较长的机器人手臂不容易在保持水平的状态承重。因此,研发小组通过在关节滑轮上缠绕多根化学纤维绳来分散和支撑负载,实现了此次的机器人手臂。今后,不仅是保持水平承重,还将开发能提起和搬运重物的技术。
这款机器人手臂采用细长形状,而且拥有多个关节,因此能躲避障碍物,可以进入狭窄的场所进行探测。此次验证机械臂水平时可承重10kg,因此有望利用该机械臂,使桥梁和隧道等大型建筑物的基础设施检查作业中的目视检查及锤击检查实现自动化等。
另外,设定机械臂长10m、直径20cm、承重10kg的参数是为了让机器人手臂抵达核电站反应堆安全壳的中心部位,搬运各种调查设备,通过听取实际参与废堆作业的企业的意见,东京工业大学设定了这些目标值。
【1】基于纤维绳的多关节驱动机构
基于纤维绳的关节驱动机构能将较重的驱动部集中配置在基础部分,因此优点是可以减轻机械臂本身的重量。各关节安装了自由转动的滑轮,绳索缠绕在滑轮上。绳索顶端固定到机械臂顶端,拉动根部,顶端的关节会产生力(扭矩),经过的所有关节都会产生相同大小的扭矩(图4)。
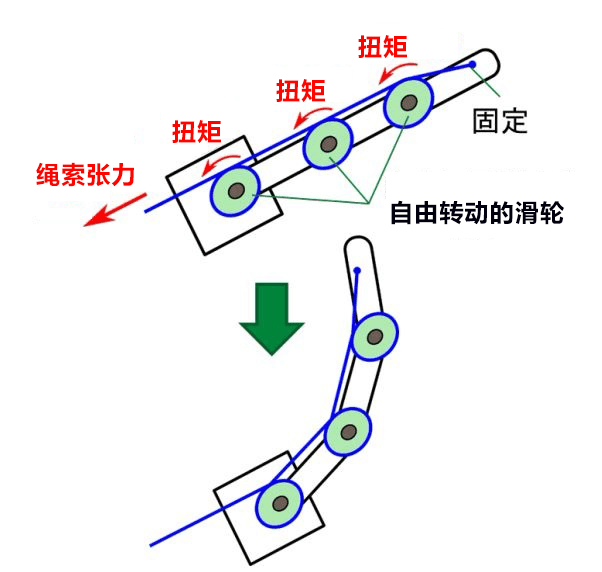
图4:纤维绳的干扰驱动原理
利用该特性,驱动顶端关节的扭矩也能用来驱动根部关节,因此根部可以产生非常大的扭矩。针对这种机构(图5(a)),此次新开发了在中心部分穿过一根粗绳索,利用粗绳索支撑机械臂自身的大部分重量,然后用细绳索单独控制各个关节的细微动作的方法(图5(b))。
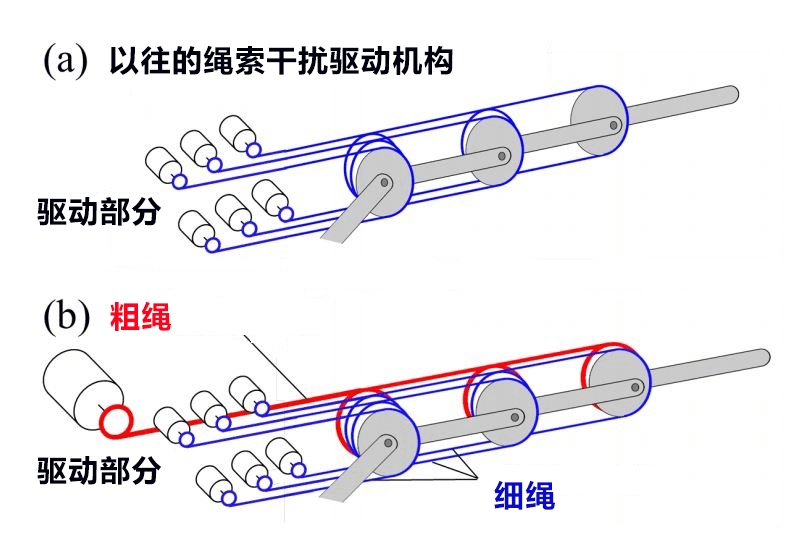
图5:以往的干扰驱动机构(a)、新开发的机器人机构(b)
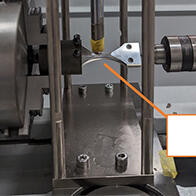
利用该机构,通过用多根化学纤维绳分散和支撑负载,与以往相比,机械臂顶端能够承受更大的重量,此次实现了10kg的水平承重(图6)。粗绳索的直径为5.5mm,通过驱动部产生了最大3000kg重的张力。
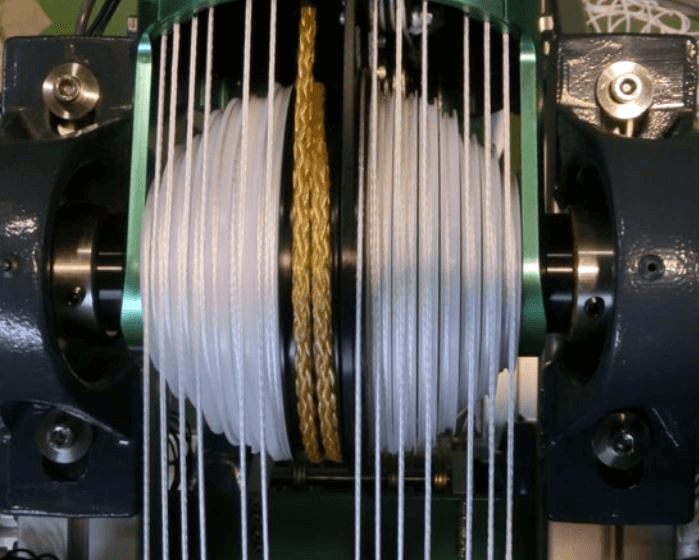
图6:实际的根部关节的结构
文 JST客观日本编辑部