大阪大学研究生院基础工学研究科的山田真由研究生、大桥Hiro乃特任研究员、细田耕教授和志垣俊介助教,与东京工业大学工学院系统控制系的仓林大辅教授组成的研究团队全球首次证实,昆虫有效搜索气味来源需要整合多个感官的信息。
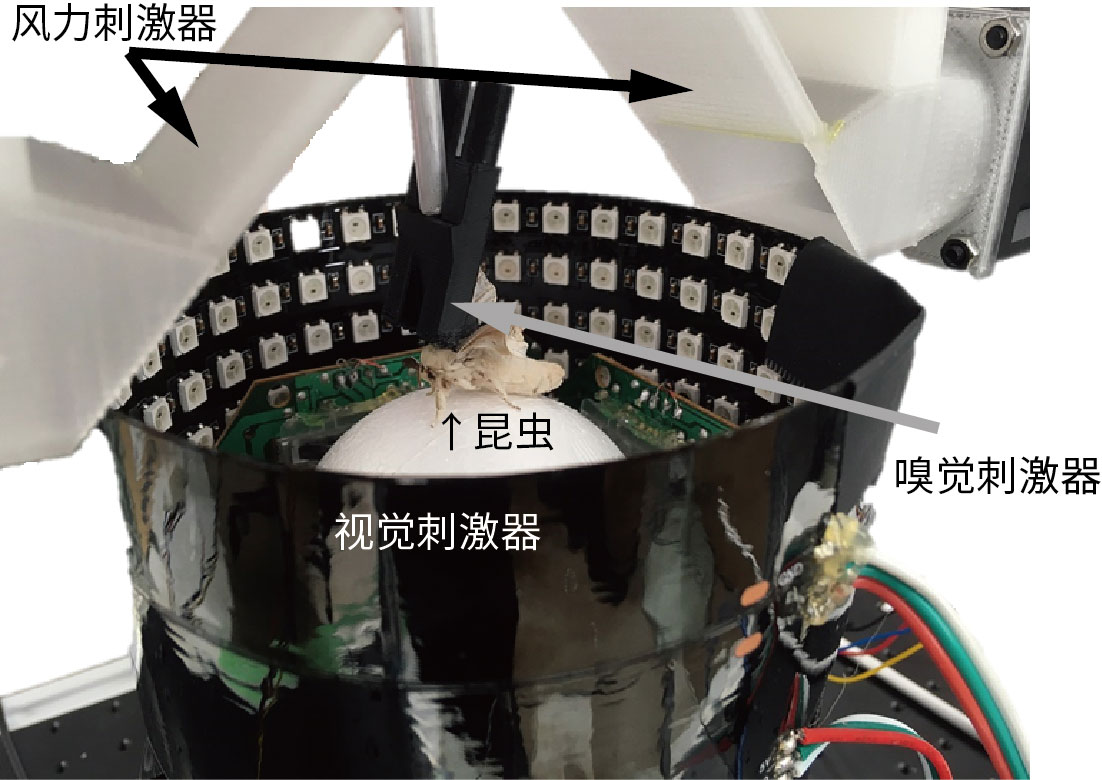
大阪大学研究团队开发的昆虫分析气味来源搜索行为的VR装置(供图:大阪大学)
尽管对生物的卓越适应能力进行人工化的研究有很多,但目前尚未开发出一个能在所有环境中都能表现出像生物一样的机器人。其原因是,我们尚未明确生物暴露于各种环境时从环境中接收了什么样的信息并将其反映到了行为中。
研究团队通过将虚拟现实技术应用于昆虫,为其营造了一种宛如在真实环境中移动的错觉,并获得了逐渐改变呈现给昆虫的环境时的行为变化关系。为了阐明昆虫的适应性气味来源搜寻行为,研究团队构建了可以同时连续呈现多种环境信息(气味、风、光)的昆虫VR系统。
另外,还利用昆虫VR系统调查了,雄桑蚕寻找雌桑蚕时是如何整合信息的。通过生物学分析发现,气味和风的信息有助于调整爬行和旋转的速度,视觉信息有助于控制姿势。此外,还根据生物学数据构建了模型,并通过模拟评估了功能。结果表明,该模型比过去构建的气味来源搜索模型具有更高的搜索成功率,而且搜索轨迹也与生物相同。
志垣助教表示:“昆虫会根据感官刺激的细微差异改变自己的行为,因此,为了给昆虫营造宛若在真实环境中爬行一样的错觉,确定感官刺激的强度和速度时大费周章。今后将根据通过昆虫VR获得的生物实验数据构建操作机器人的模型,并将其实现为,即使在恶劣的环境下也能完成任务的机器人系统。”
原文:《科学新闻》
翻译编辑:JST客观日本编辑部