东京工业大学的只野耕太郎副教授与工学院的博士生Solmon Jeong开发了既能提高手术精度又可以减轻术者负担的新型手术支援机器人系统。
手术支援机器人一般为主从式,即术者通过移动自己手中的主操作手,来操纵插入患者体内的从操作手。主从式手术支援机器人的手中操作分为用拇指和食指捏住主操作手的捏握式和用整个手掌握住主操作手的抓握式。捏握式适合精细的作业,但术者的负担大。抓握式虽在完成精细作业方面不如捏握式,但术者的负担小。为此,研究团队新开发了通过结合捏握和抓握两种动作,既能完成精细作业,又可以减轻术者负担的主操作手。
为实现捏握和抓握的“组合式握持”设计,研究团队首先试制了用拇指和食指的指尖捏住镊子状部分,用其余手指和整个手掌握住抓握部分进行操作的验证模型(图1)。研究团队共制作了4种验证模型,包括指尖方向及用手掌握持的握柄距离和角度可以调节的类型,以及固定的类型,并调查了打结花费的时间和所需的动作。调查发现,具备可变机构的模型与固定类型相比,执行任务所需的时间和动作都比较少。
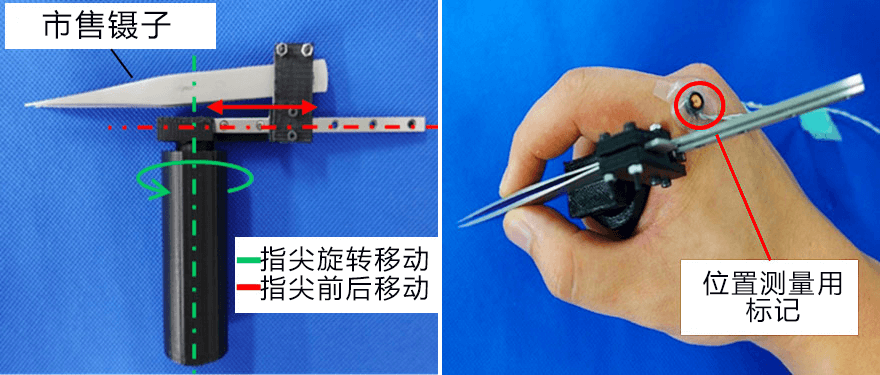
图1:结合捏握和抓握的验证模型
研究团队以利用验证模型获得的初步结果为基础,结合捏握和抓握,开发了可调节指尖和抓握部角度及距离的握持器件(图2、3)。这种握持器件在距离抓握部30~50mm的范围内,无需移动腕部即可前后左右移动指尖。
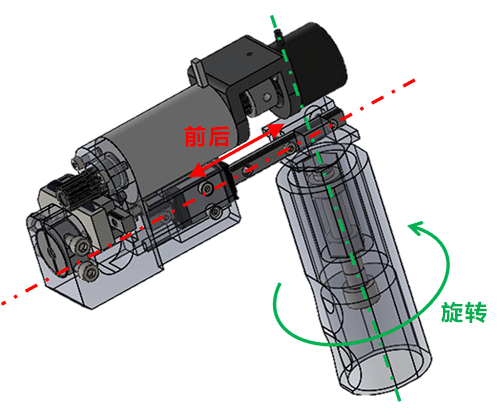
图2:本次研究开发的结合捏握和抓握的握持器件
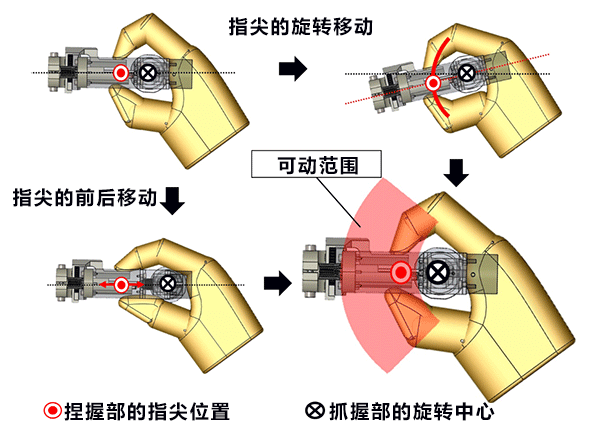
图3:新开发的握持器件的平面图。在距离握持部分30~50mm的范围内,无需移动腕部即可移动指尖。
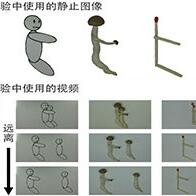
在实际的外科手术中,高精度定位非常重要。研究团队分别利用新开发的组合式握柄主操作手和以往的抓握式及捏握式主操作手实施了指向实验,比较了位置控制操作性能。另外,还研究了将主操作手的动作缩小转换为从操作手动作的比例因子对从操作手位置控制的影响。
结果显示,在失败频率、所需时间和手的移动距离等操作性方面,抓握式在比例因子较大时,捏握式在比例因子较小时操作性相对更出色,而新开发的组合式在这两种情况下均表现出了优异的性能。
论文信息
题目:Manipulation of a master manipulator with a combined-grip-handle of pinch and power grips
期刊:《The International Journal of Medical Robotics and Computer Assisted Surgery》
DOI:10.1002/rcs.2065
文:JST客观日本编辑部编译