日本国立研究开发法人新能源产业技术综合开发机构(NEDO)和埼玉大学在兴电舍公司及WACOH-TECH公司的协助下,全球首次成功开发出了采用高动态范围(HDR)力觉传感器的组装机器人。
此次新开发出了力检测范围(动态范围)为10g至20kg重、达到原来10倍的传感器,以及能识别微小力度的人工智能(AI)技术,通过配备这些技术,机器人可以边调节微小的力度边进行精密的组装作业。
该机器人不但能控制力度组装容易划伤的树脂材料等,还可以检测提醒组装操作已完成的咔哒声,利用机器人的组装作业有望实现升级。
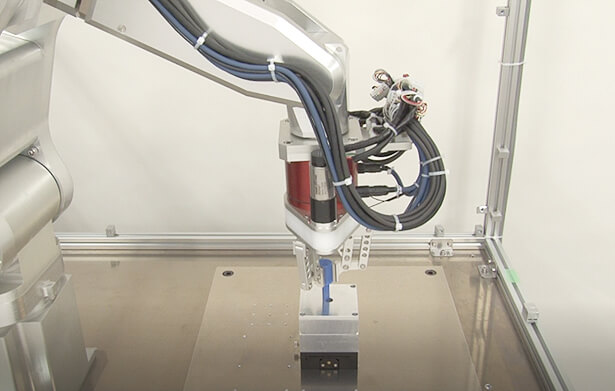
图1:采用HDR力觉传感器的组装机器人
1.概要
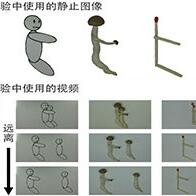
近年来,通过配备力觉传感器,在调节力度的同时实现高级组装的机器人越来越多。不过,这些机器人存在一个严重的课题,即力觉传感器的检测范围(动态范围)较小,无法测量微小的力,无法精确调节力度。因此,产业领域要想推进省力化,需要开发和导入采用高性能力觉传感器的组装机器人。
为此,NEDO和国立大学法人埼玉大学为实现高级组装动作的自动化,于2018年度启动了利用高动态范围(HDR)运动解析技术的组装机器人研究开发项目。在该项目中,与WACOH-TECH公司合作开发了能大范围检测力(从微小的力到较大的力)的HDR力觉传感器,此次又在兴电舍公司的协助下,成功开发出了采用该传感器的组装机器人。这是全球首次开发出配备HDR力觉传感器的组装机器人。
该机器人的力检测范围为原来的商用力觉传感器的10倍,可检测从10g重到20kg重的力。由于最小能检测原来十分之一的力,树脂材料等容易划伤的对象物也可以控制力度进行组装。另外,利用可基于精确的力信息进行机器学习的人工智能(AI)技术能准确识别组装状态,可实现更高级的组装作业。例如,组装结束时会进行振动,进行会发出表示安装成功的咔哒声的组装作业时,通过利用力检测振动,机器人能更准确识别出组装成功,提高作业的可靠性。由此,除了利用以往的机器人力觉传感器能完成的作业外,还可以扩大机器人的应用范围,完成需要精确调节力度的作业。
2.成果
【1】通过动态范围为原来10倍的力觉传感器和机器人实现精确的力觉检测
此次开发的HDR传感器通过采用结合不同范围应变发生体的独特多级结构,与以往的商用传感器相比,实现了10倍的动态范围,能检测10g至20kg重的力。配备该传感器的机器人具备非常灵敏的力觉,即使利用像羽毛一样轻的物体触碰机器人也能检测到。虽然机器人重达30kg,但用一支羽毛就能操作。
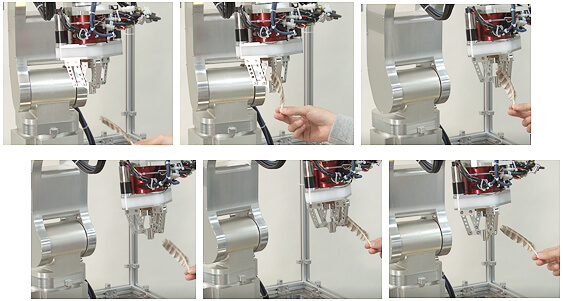
图2:随着羽毛触碰产生的力(重约10g)移动
【2】利用精确的力觉实现组装
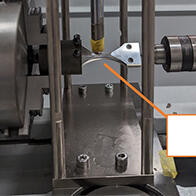
利用上述【1】的技术实现了组装动作。在插轴入孔作业中,以前很难组装塑料等容易划伤的材料,但此次由于最小能检测到原来十分之一的力,能以不会损伤材料的微小力度接触并进行组装。
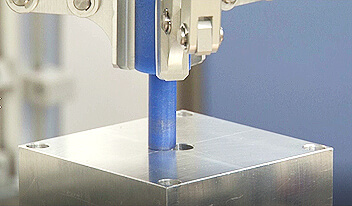
图3:树脂材料的组装作业
【3】利用识别微小力觉的AI技术提高组装作业的可靠性
在对机器人精度要求比较高的盖子组装等高级组装作业中,为提高成功率,需要识别作业是否成功,并通过在失败时重新作业来提高成功率。因此,此次开发了利用力觉检测技术检测表示作业成功的咔哒声,用以判断作业是否成功的人工智能(AI)技术。利用AI的深度学习功能,组装作业失败时可微调动作重新作业,由此能大幅提高高级组装动作的可靠性。
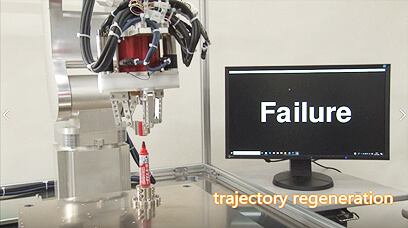
图4:作业失败后重新作业的机器人
【4】利用自动调整机器人刚性的AI技术实现高级组装作业
众所周知,人类通过调节身体的刚度来精确调节力的大小。研究团队此次根据这一点,开发了通过强化学习来自动学习适合组装作业的机器人刚度的AI技术,并配备于机器人。通过从过去的动作中学习,即使是高级组装动作,也能精确而迅速地调节力度。
文:JST客观日本编辑部翻译整理