日本新能源产业技术综合开发机构(NEDO)正在推进“新一代人工智能与机器人核心技术开发”项目,此次与日本DOUBLE Research and Development公司和都立产业技术高专合作,开发出了配备可变刚性机构的三指机械手,具备能抓握不同形状物体的抓握多样性,而且可根据动作固定手部姿态(图1)。
这款机械手的各个手指利用一个驱动装置追随物体的形状,能应对具有复杂形状的抓握对象。此外,还配备能将各个手指的姿态固定(锁定)在任意位置的机构,提高了抓握位置的精度。
利用新开发的这款机械手,以前需要根据抓握的物体更换机械手的生产线以及处理各类物体的物流仓库等,有望实现分拣作业的自动化、降低机械手的导入成本。
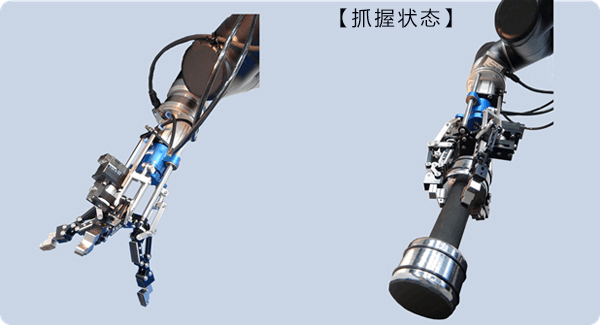
图1:“D-Hand Type R”
表1:“D-Hand Type R”的标准性能参数
|
抓握力 [N] |
60 |
|
|
抓握开口宽度 [mm] |
180 |
|
|
承载重量 |
包覆式抓握 [kg] |
10 |
|
指尖抓握 [kg] |
5 |
|
|
开关速度 [mm/s] |
450 |
|
|
重复精度 [mm] |
0.1 |
|
|
手部重量 [kg] |
1.5 |
|
该机械手的手指采用了此前开发的名为“机巧”的机构。此前的机构在抓握物体时,仅利用一个驱动装置驱动多个指关节,在各手指弯曲时追随抓握物体的形状,但控制时留有余量,对外力的承受能力较弱,存在无法固定住抓握的物体的课题。
此次针对这一课题开发了新的3D柔性单元,能在追随物体形状的状态下固定住各手指,从而不容易受外力影响,而且能保持住抓握的姿态。具体来说,3D柔性单元在准备抓握时处于可动状态,会根据物体的形状移动,抓住物体后就变成固定状态,从而将对象物体的姿态固定在任意位置(图2)。
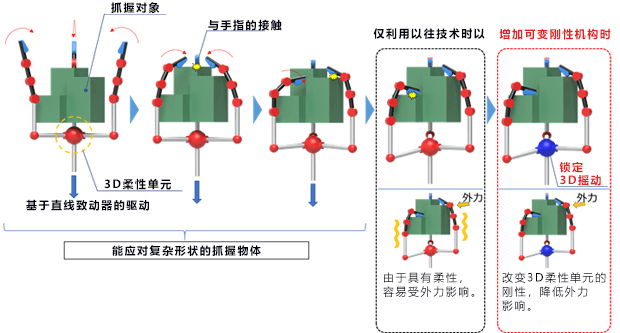
图2:抓握功能及特征的概要图
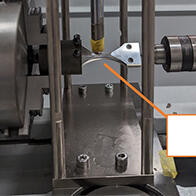
利用这样的机械手,能以各种姿态抓握形状各异的物体,不仅是制造和物流行业等的简单搬运用途,通过改变机械手的刚性,还能完成加工工序和组装工序的作业。例如在把粗料放到加工机卡盘上的工序,当人用手操作时,有时会减轻力度,从而灵活移动手指和手腕关节,使抓握的物体进入插入部,有时会加大力度来固定住关节的动作完成操作。新开发的机械手采用了可以像人类那样根据前臂和手腕的动作固定手部姿态的可变刚性功能,能取代需要发挥人类灵活性的手工作业,还可实现多品种分拣作业的自动化(图3、图4)。
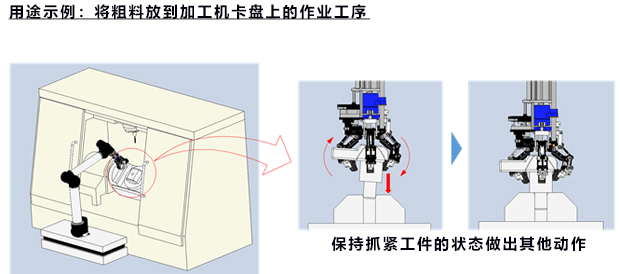
图3:用途示例及其效果
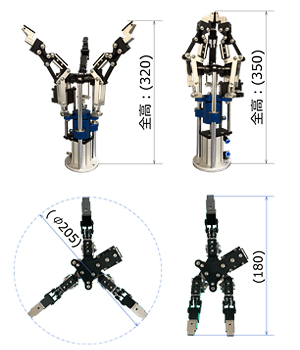
图4:“D-Hand Type R”标准款的大致尺寸
此次开发的机械手“D-Hand Type R”从12月5日开始接单生产,还计划在12月18日至21日于东京有明国际会展中心举行的“2019国际机器人展”(iREX2019)上展出。
<展会信息>
2019国际机器人展(iREX2019)
会场:东京有明国际会展中心 青海·西·南展厅
会期:2019年12月18日(周三)~21日(周六)
网站: 2019国际机器人展
文:JST客观日本编辑部翻译整理